

酷哇發佈 WAM 2.0 世界模型,加速構建“自動駕駛+機器人”的RoboCity 新基建

2月5日,行業領先的城市通用 AI 機器人服務提供商酷哇科技(Coowa )正式發佈 Coowa WAM 2.0 (World-Action Model) 通用世界模型底座,並披露公司已率先實現年度 EBITDA(息稅折舊攤銷前利潤)回正。
這一里程碑式成果,標誌着酷哇已構建起“技術底座+商業規模”的雙輪驅動體系,正式開啓萬臺級“城市新基建”的規模化部署。
三大矩陣驅動,構建全場景智能生態
不同於行業早期的單點技術驗證模式,酷哇依託通用的 Physical AI 底座,構建起成熟的“智慧出行 + 智慧物業 + 智慧城市管家”三大業務矩陣,爲萬臺級規模化交付提供了堅實場景:
•智慧出行領域: 酷哇自研的自動駕駛小巴 CooBus 致力於解決“最後三公里”痛點,目前已與國內多個城市簽署戰略協議,累計安全運營里程突破 500 萬公里。
•智慧物業領域: 針對高端樓宇與封閉園區的複雜交互需求,由輪足機器人 R0 與四足機器人 D0 組成的“黃金搭檔”,正逐步確立寫字樓及高端住宅中的創新服務範式。
•智慧城市管家領域: 以“麒麟”X3、“獨角獸”X1 爲代表的機器人軍團,憑藉成熟的規模化應用能力,持續鞏固酷哇在城市精細化治理中的行業標杆地位。

唯一集齊“北上廣深”版圖的行業領跑者
在商業化落地的廣度與深度上,酷哇已構築起極高的行業壁壘。截至目前,酷哇是行業內唯一一家同時進駐北京、上海、廣州、深圳四個超一線城市開展常態化城市服務業務的機器人企業。一線城市業務佔比從 2022 年的不足 2% 躍升至 2025 年的 25%。這種在高人流密度長尾場景下的常態化運營,不僅驗證了酷哇產品的極高適應性,更確立了其在城市服務領域的絕對領先地位。
這一爆發式增長,本質上是市場紅利與酷哇極致交付能力的雙向奔赴:
•機器人在城市服務領域剛需爆發: 公開數據顯示,2025年智慧環衛需求突破74億元/年,相較2023年提升了約4倍,千萬元以上智慧環衛項目中規模化使用比例(扣除試點訂單,即單項目至少有10臺車以上投入的訂單)在2025年達到30%,這表明市場對城市智能機器人的需求已正式從“試點嚐鮮”轉爲“剛需認可”。
•市佔率持續領先: 在單項目投入10臺以上的規模化訂單中, 酷哇市場佔有率約80%,交付能力居市場最高水平。
•長期價值認可:2025年客單價較2022年增幅達106%,單客戶年均付費金額的大幅提升,充分印證了客戶對酷哇長期價值的深度認可。
從“技術供給”到“全球生態”,完成戰略躍遷
酷哇之所以能實現 EBITDA 回正與規模化爆發,究其原因,是已完成從單一技術廠商向“城市通用 AI 機器人服務提供商”的戰略躍遷,並實現了國內與海外的雙向賦能:
•“央企+城服”雙輪驅動:在國內市場, 酷哇近期連續與浦發集團、北控集團、亦莊控股、盈峯環境、玉禾田、金地物業等大型國央企和上市公司達成深度合作,鎖定了長期穩健的訂單基本盤。
•海外加速全球佈局: 在准入標準極爲嚴苛的新加坡與阿布扎比,酷哇的商用機器人車隊已實現常態化運營。同時,公司積極拓展東亞、中東、西歐等發達國家區域。
這標誌着酷哇的技術已具備跨越法規與工況差異的全球普適性,正憑藉軟硬一體的極致交付能力,加速向全球輸出中國智造的“城市通用 AI”方案。

以Physical AI 全棧通用底座,定義城市具身智能新範式
爲何酷哇能實現"萬臺級"的規模化躍升並攻克全球高端市場?
行業的解題思路已十分清晰:面對真值數據稀缺與長尾場景無窮盡的挑戰,必須構建一套系統化且具備商業造血能力的規模化模式。唯有通過商業閉環的無限運轉,才能在物理世界中“窮盡”海量的真值數據,進而反哺技術的迭代。
酷哇的破局之道,在於構建了“通用 AI 系統(大腦) + 規模化商業場景(身體)”的雙輪驅動體系。
首先,在覈心的模型側,酷哇打造了一套類生物神經系統的 Coowa Physical AI 全棧平臺。該平臺精密劃分爲模型層、基礎設施層與應用層,三者協同運作,幫助跨場景機器人實現了從感知世界到改造世界的完整閉環。


第一層:模型層 (The Model Layer)—— Coowa WAM 2.0 通用世界模型
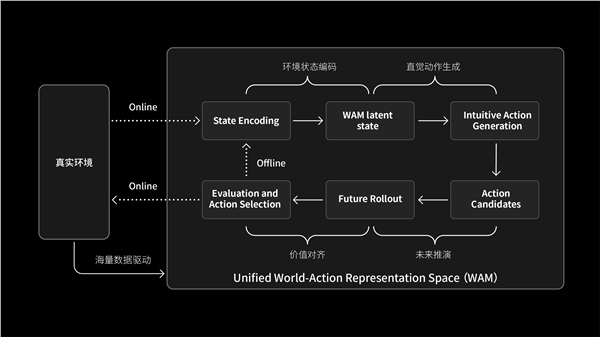
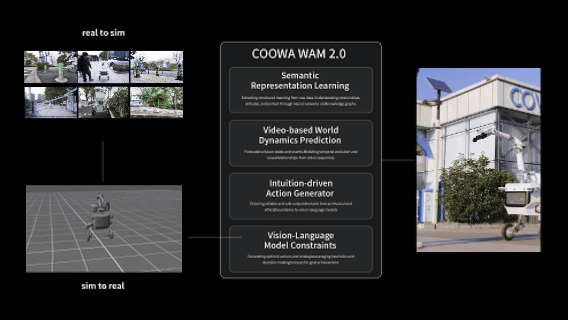
針對物理世界中“長尾場景(Corner Case)不可窮舉”與“零樣本決策”的行業痛點,酷哇引入人類認知機理,構建了集“System 1 (直覺響應) + System 2 (邏輯推理)”於一體的雙核驅動架構——Coowa WAM 2.0。該架構不再依賴單一規則,而是通過“快慢思考”的協同,實現了對複雜環境的類人化理解。
1.1 System 1:直覺行動系統 (Intuition-driven Action Generator)
在瞬息萬變的開放環境中,直覺行動系統構成了機器人的“快思考”中樞。它不再依賴耗時的邏輯搜索,而是基於 Real-to-Sim-to-Real 閉環,利用 AIGC 技術在潛空間(Latent Space)中直接推演未來。
通過反事實推演(Counterfactual Reasoning),模型能基於直覺快速並行生成多組動作候選,並提前預判物理後果。這種機制相當於在行動前完成了億萬次虛擬試錯,讓機器人即便在突發狀況下,也能憑藉“經驗直覺”生成最優解,實現 Drive 與 Work 的無縫耦合及實時響應。
1.2 System 2:UrbanVLM 宏觀約束 (Vision-Language Model Constraints)
針對城市服務中低頻但邏輯複雜的長尾場景(如理解交警手勢、判斷倒塌樹木的優先級),酷哇引入自研的 UrbanVLM,承擔宏觀規劃與因果約束的職責。它不直接輸出控制信號,而是爲直覺系統提供更高層的“語義圍欄”。
•雲端深思 (UrbanVLM Large, 32B): 擁有320億參數的多模態大腦,負責全局任務編排。它能讀懂複雜的自然語言指令(如“優先清理堵塞排水口的積物,防止暴雨積水”),並將其拆解爲具身智能可執行的原子任務序列。
•端側推理 (UrbanVLM Tiny, 3B): 部署在機器人邊緣側的小參數模型,負責百毫秒級的高維理解及策略約束。例如,它能通過語義分析識別出前方障礙物是一個“正在玩耍的兒童”,根據常識約束底層的策略使進行必要的保守禮讓並停止工作。
此外,基於 WAM 底座,又衍生出兩大核心引擎:
○Drive AI(全場景移動引擎): 機器人的“雙腿”。基於 End-to-End Transformer 架構,它不再依賴規則,而是基於推演結果在機動車道、輔道及樓宇通道中生成最優軌跡,在人車混流的博弈中實現“類人”的平滑通行。
○Work AI(VLA 協同作業引擎): 機器人的“雙手”。基於 VLA (Vision-Language-Action) 架構,實現了視覺感知與機械臂動作的端到端對齊。通過學習數百萬小時的環衛與物業作業真值數據,它能自適應調整清掃力度和機械臂軌跡,將運動控制誤差收斂至厘米級。
第二層:基礎設施層 (AI Infra)—— 虛實共生的進化血液
模型能力的上限,取決於數據的質量與規模。酷哇構建了工業級的 AI Infra,從2018年商業化至今,酷哇早期即堅持規模化部署真機進行數據採集,搭建了“硬件-數據-模型”的閉環管線:
•50PB 數據湖: 存儲了來自50+城市的全天候真實運行數據,爲模型提供物理世界的“真理”。
•World Sim(世界仿真器): 當遇到罕見的極端 Corner Case(如極端天氣作業),系統利用 AIGC 技術在仿真空間生成數萬個變種場景,進行對抗性訓練。
•自動化管線: 利用大模型對海量數據進行自動清洗與標註,將數據處理效率提升了1000倍,模型處理效率可達到按周迭代的效率,實現“機器人每跑一公里,模型就聰明一分”的複利效應。
第三層:應用層 (Application Layer)—— 物理智能體的萬千形態
基於統一的模型層與強大的基建層,酷哇得以快速孵化出形態各異的物理智能終端,服務於城市生活的方方面面——這本質上是通用智能在不同物理載體上的自然投射。
從解決城市微循環的自動駕駛小巴Coo-bus,到靈活作業於樓宇物業的“D0/R0”系列泛人形與輪足機器人;再到穿梭於城市角落的X系列城市管家機器人——酷哇的產品線已實現對城市物理空間的全方位覆蓋。
這種“全家福”式的產品佈局,配合酷哇自研線控底盤、智能上裝以及雲控平臺的垂直整合能力,使得酷哇區別於僅提供單點技術的公司,具備了提供“綜合城市大管家方案”的能力,真正實現了對城市毛細血管的智能化重塑。
以終爲始:數據飛輪驅動,通向Robo city終局
商業規模的爆發,爲酷哇構建了難以複製的數據壁壘。目前,酷哇已在全球超過50個城市和地區、累計4,500萬公里的真實運營中,沉澱了數百萬個高價值長尾場景(Corner Case)數據點。
這正是酷哇“增長飛輪”高速運轉的動力源:
酷哇堅信,技術先進性與商業規模化互爲因果。WAM 通用模型底座大幅降低了場景適配成本,推動了萬臺級商業規模的落地;而大規模商業運營產生的海量物理交互真值數據(Physical Interaction Data),又反哺模型持續進化,進一步鞏固了技術護城河。
在這一飛輪驅動下,酷哇正加速向“終局場景”邁進:一個萬物互聯的RoboCity(機器人生態城)。
在這個城市裏,數萬臺形態各異的機器人將不再是孤立的個體,而是通過WAM共享同一個“世界認知”的智能集羣,共同構成了一套覆蓋全城的物理智能體網絡(Physical Agent Network)
此時的酷哇,已經不僅是機器人的製造商,更是這套城市新基建的“定義者與運營商”。就像水務公司管理水網、電力公司管理電網一樣,酷哇正在管理着城市的“算力與勞動力網絡”。

相關文章
輝達、博通與 Palantir 今日為何暴跌?
TradingKey - 科技股週三急轉直下,受軟體股拋售潮拖累。部分今年最受歡迎的熱門股跌幅達兩位數,投資者正評估一項新的競爭威脅:來自 Anthropic 的新一波人工智慧工具。
比特幣的四年週期是否將於2026年失效?
比特幣四年週期是否已終結?在 2025 年打破歷史紀錄,成為減半後首個收跌的年份後,機構分析師正探討比特幣價格是否已與減半倒數脫鉤。本文分析現貨 ETF、全球流動性的影響,以及在 2026 年市場環境下邁向 2028 年減半的發展藍圖。
美元走勢預測:美元指數跌破 97.0 至 4 年新低,2026 年美元繼續下跌還是觸底反彈?
TradingKey - 2026年1月份,美元指數延續2025年的下跌走勢,正式跌破97.0關鍵關口,最低下探至95.5,創下自2022年2月以來的近4年新低。


